Next:
La matrice jacobienne
Up:
Systèmes d'équations non linéaires
Previous:
Donnée du problème
La méthode de Newton
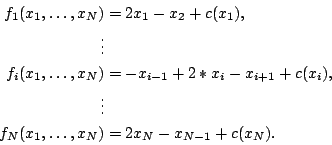
Soit
le
-vecteur défini par
Ecrivons le système (
8.1
) sous la forme
, avec
. Nous avons clairement
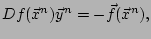
Etant donné un
-vecteur
, la méthode de Newton consiste à résoudre le sytème linéaire
(
8
.
2
)
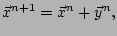
et à calculer
(
8
.
3
)
pour
.
Next:
La matrice jacobienne
Up:
Systèmes d'équations non linéaires
Previous:
Donnée du problème
EPFL-IACS-ASN
 le
le  -vecteur défini par
-vecteur défini par
 , avec
, avec
 . Nous
avons clairement
-vecteur
. Nous
avons clairement
-vecteur  ,
la méthode de Newton consiste
à résoudre le sytème linéaire
,
la méthode de Newton consiste
à résoudre le sytème linéaire
 .
.